
Idea: My cat has a “bristle-bot” style toy, but it’s not a favorite. He’ll watch it as it wanders randomly around the floor, but he doesn’t really engage with a toy unless it “hides” — goes behind other objects so he can strategize about where it’s going to show up next.
The style of motion in these robots is kind of neat. There are no wheels. Instead, they operate with vibration. There’s something insect-like about the movement.
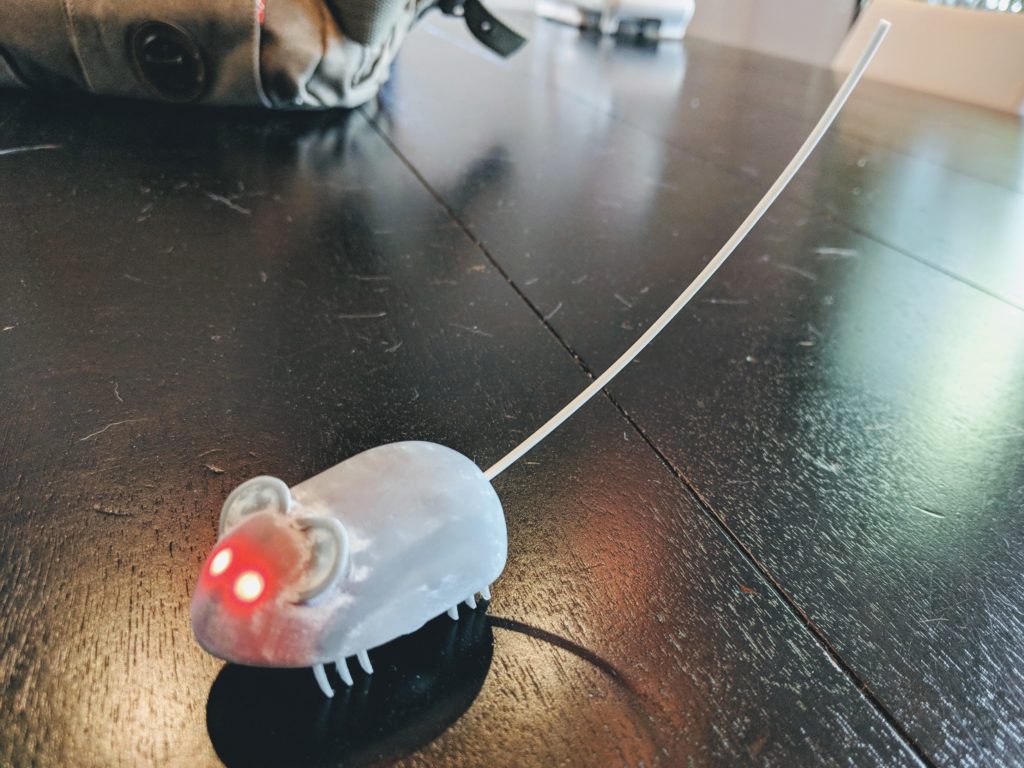
Can I make a bristle-bot toy that I can control with my phone so my cat and I can have fun together? Yes… Well, I made a toy. I didn’t succeed in engaging my cat.

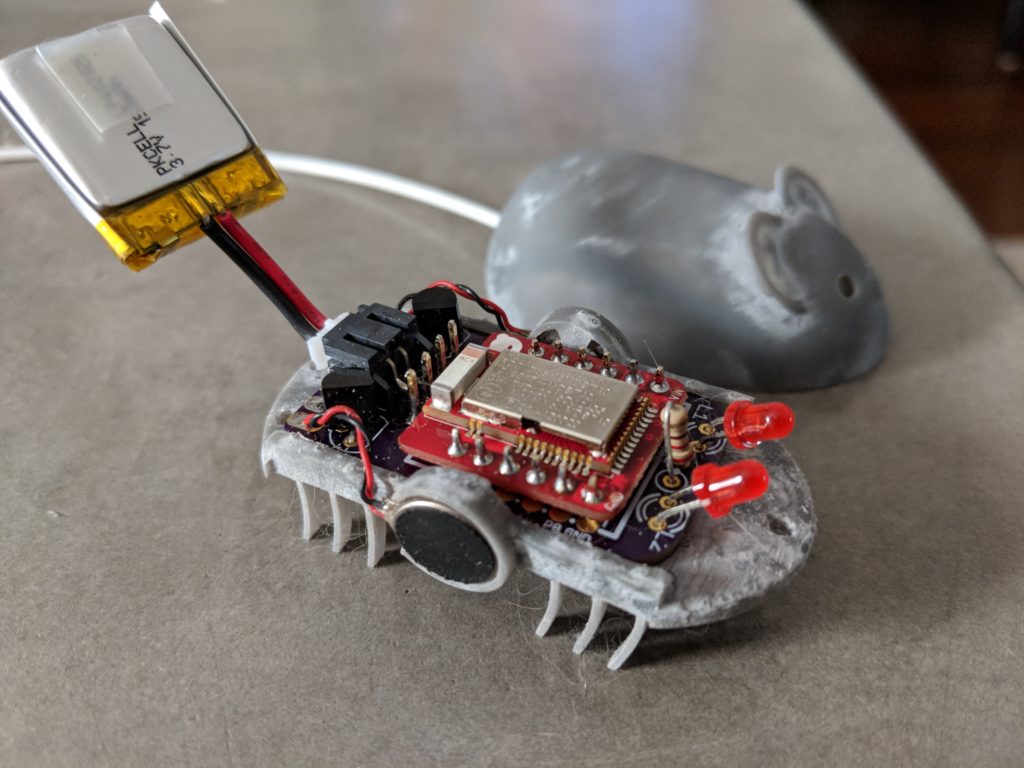
A Bluetooth Mouse for Cats in Lab-mouse White.I experimented with a couple of different designs. The parts list for this version includes:
- Bluetooth controller (I used Redbear Labs’ BLE Nano)
- 2 6mm 3v disc-style vibration motors for motion.
- 2 LEDs for eyeballs and status indication (disconnect: flash, connected: solid).
- A pair of transistors for switching current to the motors.
- A small LIPO battery (150 maH).
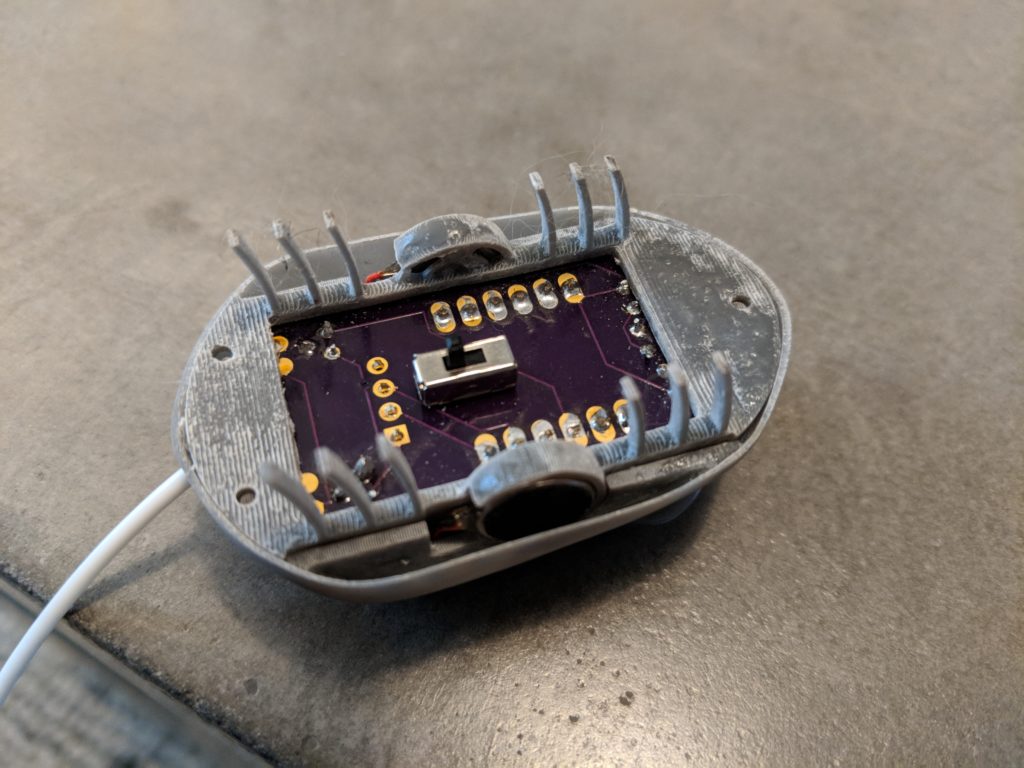
- A power switch.
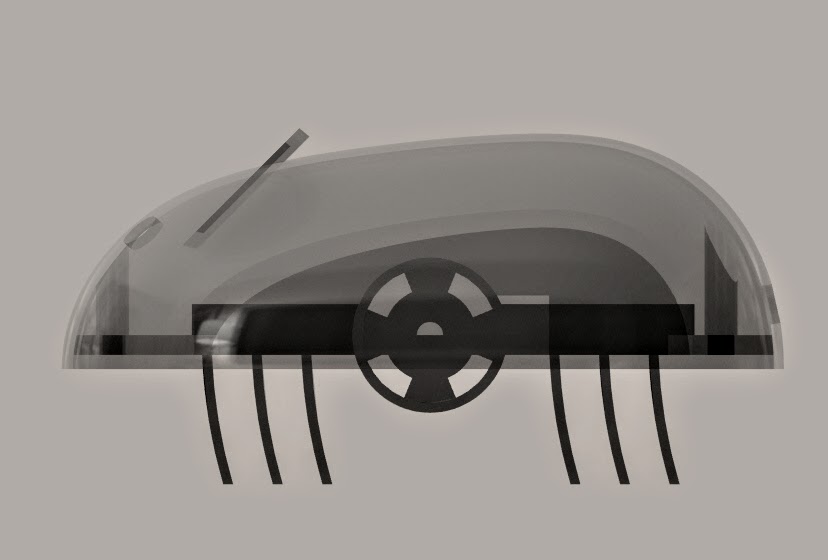
The design also includes a 3d-printed mouse body and a custom PCB to keep everything compact.
The operating principle is that since vibration motors are mounted to the sides of the body, when a motor is engaged, the vibration will cause the legs on one side of the body to flex. If both motors operate at roughly the same frequency, engaging both motors simultaneously will move the mouse forward.
I designed parts in Rhino 3d with Grasshopper. I 3d printed parts with a Form Labs Form 2, using the standard Grey resin.

Learnings:
- While the 2 distinct vibration motors offer some control over the direction of the mouse, it’s not particularly precise. It’s hard to steer around objects.
- In practice, any vibration motors I tried seemed to be somewhat unbalanced (presumably operating at different frequencies), so motion is biased to one side.
- Battery wiring initially took up a lot of space. I had to trim the leads from the LIPO battery a recrimp the JST connector. This was a pain to learn how to do. The Engineer PA-09 Micro Connector Crimpers turned out to be the right tool.